Determining the effective operating range of a LiDAR (Light Detection and Ranging) sensor is a critical factor that dictates the success of many advanced technology applications, from autonomous vehicles to topographic mapping. The detection range of LiDAR is not a fixed value but a variable influenced by a complex interaction between the sensor’s technical specifications, environmental operating conditions, and target characteristics.
This article provides a comprehensive analysis of the key factors that govern the detection range of LiDAR sensors, while also comparing its performance to other sensing technologies such as radar.
Factors Affecting the Detection Range of LiDAR
1. LiDAR Sensor Specifications
The intrinsic characteristics of a LiDAR system form the foundation that determines its maximum operating range.
Laser Power Output: The optical energy of the emitted laser beam is a critical factor. Higher power helps the laser signal maintain intensity over long distances, improving the sensor’s ability to detect reflections from far-away objects.
Wavelength: LiDAR systems typically operate in the visible or infrared range. The chosen wavelength affects atmospheric penetration; for example, certain infrared wavelengths are less absorbed by water vapor, making them more effective in fog or light rain.
Sensor Sensitivity: The capability of the optical receiver to detect weak reflected signals is essential. A highly sensitive sensor can detect low-intensity photons returning from distant targets, thus extending the effective detection range.
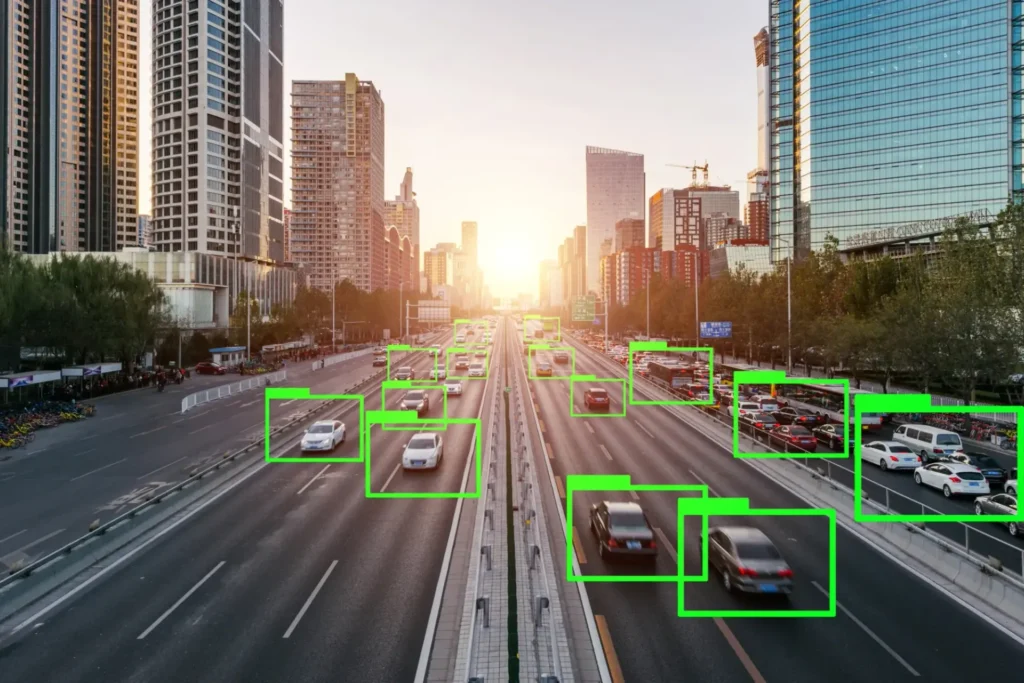
A LiDAR sensor on a roadside tripod captures 3D data on vehicle speed and distance, ideal for traffic analysis, autonomous vehicle testing, or infrastructure monitoring.
2. Atmospheric Conditions
The atmosphere acts as an attenuating transmission medium, directly affecting the laser signal.
Scattering and Absorption: Particles such as fog, rain, snow, and dust cause scattering and absorption, weakening the laser beam during both its outgoing and return paths.
Real-World Impact: In dense fog, tiny water droplets heavily scatter laser beams, significantly limiting visibility. Similarly, smoke and dust can absorb or deflect signals, reducing the effective detection range.
3. Target Reflectivity
The optical properties of the target surface determine how much laser energy is reflected back to the sensor.
High Reflectivity: Surfaces with good reflective properties (e.g., traffic signs, bright metals) return a large portion of the laser energy, allowing detection from longer distances.
Low Reflectivity: Conversely, dark, matte, or highly absorbent surfaces retain most of the laser energy, generating weak return signals and significantly limiting detection distance.
4. System Configuration and Use Case
How a LiDAR system is configured also creates trade-offs between detection range and other performance aspects.
Field of View (FOV): A wide FOV allows the system to scan a larger area per cycle, but laser energy is distributed across a wider space, potentially reducing the effective detection range at each point.
Angular Resolution: Higher angular resolution yields denser point clouds for better object recognition but may require longer scanning times or reduce maximum range to maintain point density.
Technology Factors Affecting Detection Range
1. Time of Flight
LiDAR operates on the principle of measuring the time it takes for a laser pulse to travel to a target and return.
Timing Accuracy: Shorter, sharper laser pulses allow for more accurate determination of travel time, improving distance resolution and the ability to distinguish closely spaced objects.
2. Signal Processing
Advanced signal processing algorithms play a critical role in extracting useful information from weak and noisy return signals.
Signal-to-Noise Ratio (SNR): Digital filtering and signal processing techniques can significantly improve SNR, allowing the system to distinguish true signals from background noise, thus enhancing effective detection range.
Multi-Return Processing: This capability allows the sensor to register multiple return signals from a single pulse, useful for penetrating complex structures like tree canopies to detect the ground below.
3. Laser Pulse Characteristics
Balancing pulse frequency and length is a key design consideration.
Pulse Repetition Frequency (PRF): Higher PRF enables faster data acquisition and denser point clouds at close range, but may introduce range ambiguity at longer distances.
Pulse Length: Longer pulses carry more energy, increasing detection range, but reduce depth resolution.
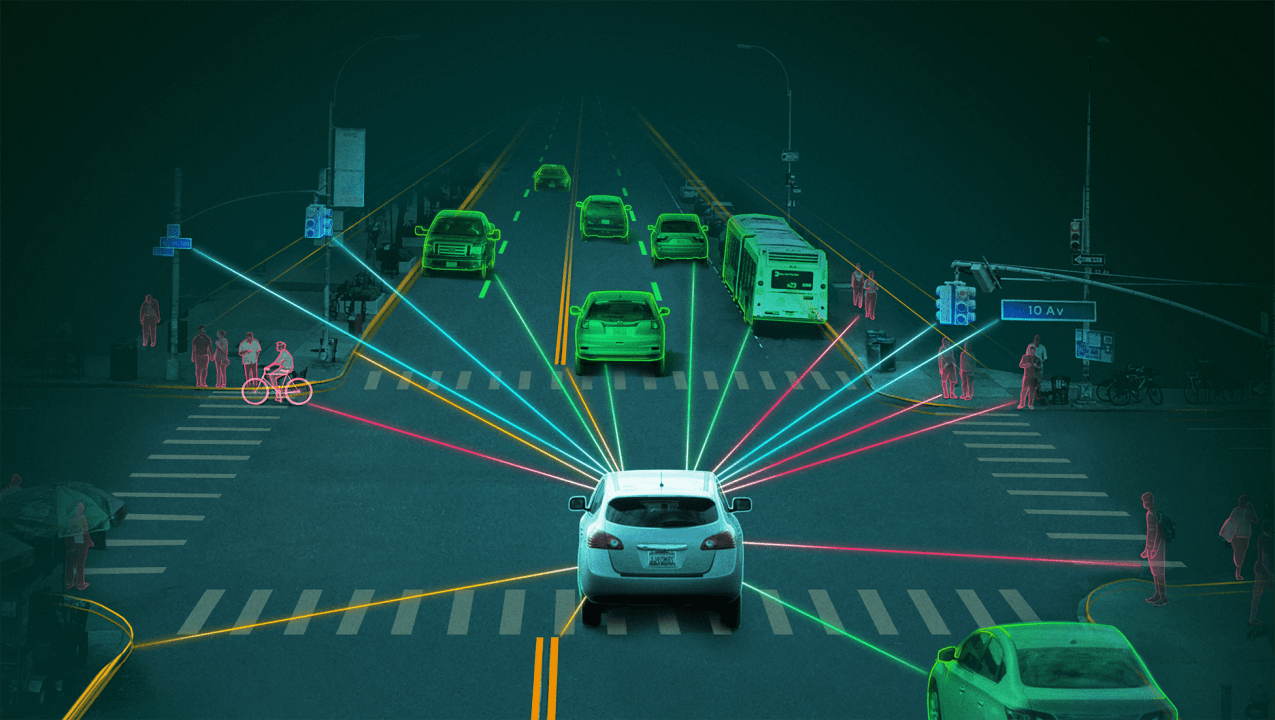
An autonomous car uses LiDAR and sensors to detect nearby objects—pedestrians, cyclists, cars, traffic signals—helping it safely navigate with real-time tracking.
Comparison with Other Technologies
1. LiDAR vs. Radar
Although both technologies are used for distance measurement, they operate on fundamentally different physical principles.
LiDAR: Uses light waves (laser), offering extremely high spatial resolution—ideal for detailed object shape recognition. However, performance is significantly affected by adverse weather.
Radar: Uses radio waves, which penetrate rain, fog, and dust effectively, providing reliable operation in all weather and at longer distances. However, radar has much lower spatial resolution than LiDAR.
2. Airborne LiDAR
LiDAR systems mounted on aircraft or drones have different operational requirements.
Power and FOV Requirements: Operating at high altitudes requires very high laser power and optimized FOV to cover large surface areas per flight path.
Trade-offs: Must balance between coverage area, detection range, and desired ground resolution.
Real-World Applications
1. Autonomous Vehicles
In self-driving cars, LiDAR detection range directly affects system reaction time—a critical factor for safety.
Long Range: Enables early detection of obstacles or vehicles, giving the system time to plan braking or lane changes.
Short Range: High resolution at close range is essential for tasks like parking or navigating tight spaces.
2. Environmental Monitoring
LiDAR is a powerful tool in forestry, agriculture, and atmospheric sciences.
Forestry and Agriculture: Enables creation of digital terrain models (DTMs), biomass evaluation, and detailed canopy structure analysis.
Atmospheric Monitoring: Used to measure cloud structures, track pollutant dispersion, and study atmospheric phenomena.
Conclusion
The detection range of a LiDAR sensor is a multivariate parameter, influenced by a combination of intrinsic factors (sensor specs, signal processing technology) and external factors (atmospheric conditions, target properties). Ongoing advancements in laser technology and signal processing are continuously pushing the limits of LiDAR’s distance and precision. Understanding and optimizing these variables is key to unlocking the full potential of LiDAR in increasingly diverse and demanding applications.
Coral Mountain Data is a company providing high-quality data labeling services for artificial intelligence (AI) and machine learning (ML) models. Our solutions include processing and labeling LiDAR point cloud datasets, helping deliver high-quality input data that enhances the performance of your models.