Explore various 3D point cloud segmentation techniques, including ML models like Point-net, K-means clustering, region growing and more.
Giới Thiệu

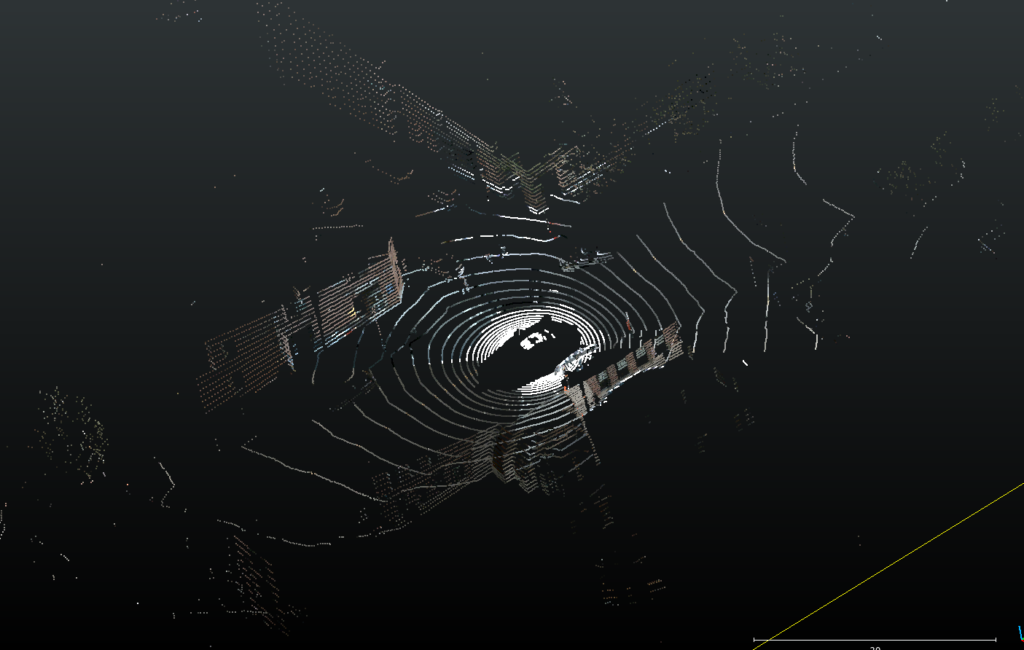
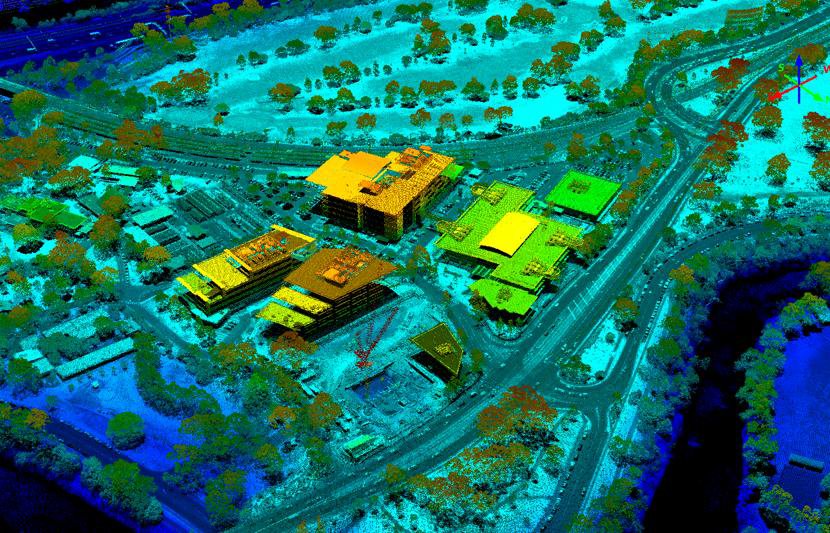
Point cloud segmentation refers to the process of dividing a 3D point cloud into identifiable and meaningful regions or objects. A point cloud—typically generated from LiDAR, 3D scanners, or photogrammetry—is essentially a collection of points defined in a three-dimensional coordinate system. Each point carries spatial information and may include attributes like intensity, color, or reflectivity. Through segmentation, this unstructured data is transformed into organized components that can be interpreted and analyzed more effectively.
As 3D scanning technologies become increasingly widespread in fields such as robotics, autonomous vehicles, and urban modeling, the need for precise and efficient segmentation techniques has grown significantly. Segmentation lays the groundwork for extracting actionable information from large-scale datasets, enabling tasks like object detection, environmental mapping, and scene understanding.
An example of a point cloud
Importance of Point Cloud Segmentation
Point cloud segmentation plays a crucial role across numerous industries. In autonomous driving, it enables systems to detect and classify vehicles, pedestrians, and infrastructure, supporting real-time decision-making. In robotics, segmentation assists with navigation, obstacle avoidance, and object manipulation. In construction, architecture, and environmental monitoring, it supports the creation of detailed 3D models for buildings, terrain, and landscapes.
By breaking down complex datasets into manageable subsets, segmentation improves the accuracy and speed of subsequent operations such as classification, object recognition, or reconstruction. Ultimately, it enhances interpretability and operational efficiency across diverse applications.
Methods and Techniques
Point cloud segmentation methods vary depending on data complexity, accuracy expectations, and computational constraints. Below are widely adopted techniques across research and industry.
1. Semantic Segmentation
Semantic segmentation assigns each point in a cloud to a predefined category (e.g., ground, vehicle, vegetation). This method is particularly valuable in urban planning and autonomous driving, where detailed scene comprehension is essential.
Classical models like Conditional Random Fields (CRFs) and Markov Random Fields (MRFs) have been used alongside modern machine learning approaches to refine labeling accuracy. As one of the most detailed segmentation approaches, semantic segmentation is indispensable for applications requiring fine-grained classification.
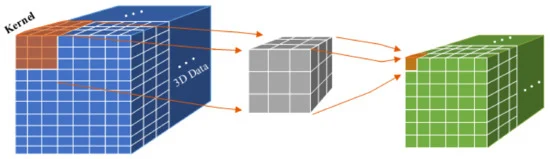
3D-CNN
3D Convolutional Neural Networks (3D-CNNs) extend conventional CNNs to three dimensions, allowing convolutional kernels to move through voxelized 3D space. This architecture captures contextual information along all axes, making it highly effective for extracting spatial features from point clouds.
A major limitation is voxelization: while it simplifies computation, it may reduce spatial resolution and discard fine details in dense regions.
2. Feature Extraction
Feature extraction identifies key geometric descriptors—such as curvature, surface normals, or local density—to aid the segmentation process. PCA and eigenvalue analysis are frequently used to derive these features.
Effective feature extraction reduces computational load and enhances performance, especially when differentiating objects with similar shapes or spatial patterns.
3. Clustering Methods
Clustering groups points that share similar spatial or statistical properties, making it suitable for separating objects or regions.
K-means Segmentation
K-means partitions points into k clusters based on distance to cluster centroids. Although it is fast and simple, it performs best with well-separated clusters and is less robust in noisy environments.
DBSCAN (Density-Based Spatial Clustering of Applications with Noise)
DBSCAN forms clusters based on point density, making it highly effective for irregularly shaped clusters. It requires two parameters: neighborhood radius and minimum cluster size. DBSCAN is noise-resistant but sensitive to parameter choices.
Hierarchical Clustering
Hierarchical clustering builds nested clusters either bottom-up (agglomerative) or top-down (divisive). It does not require specifying the number of clusters in advance, but computational cost rises with dataset size.
Mean Shift Clustering
Mean Shift identifies cluster centers by iteratively shifting points toward local density peaks. It is flexible and does not require predefined cluster counts.
GMM (Gaussian Mixture Model)
A probabilistic clustering approach that assumes the data originates from a mixture of Gaussians. It handles overlapping clusters effectively and assigns points to clusters in a soft, probabilistic manner.
4. Graph-based Techniques
Graph-based segmentation models point clouds as graphs where points represent nodes connected by edges based on spatial relationships. Segmentation is achieved through graph partitioning techniques such as Minimum Spanning Tree (MST).
These approaches excel in large-scale or complex point clouds and offer flexibility in handling irregular structures.
5. Region Growing
Region growing begins with a seed point and expands outward by adding neighboring points that meet specific criteria such as normal similarity or proximity. This technique works well for smooth, continuous surfaces like roads or walls.
While region growing is simple and accurate, it can be sensitive to noise or highly uneven point distributions.
6. Homogeneous Region Segmentation
This technique groups points with uniform properties—such as smoothness or curvature—into coherent regions. It is widely used in architectural modeling and environmental analysis where large surfaces must be segmented reliably.
Methods often employ curvature thresholds or surface normal consistency to identify homogeneous zones in large datasets.
7. Deep Learning in Point Cloud Segmentation
Deep learning has dramatically advanced point cloud segmentation. Models such as PointNet and PointNet++ introduced end-to-end learning directly from raw points, eliminating the need for handcrafted features.
PointNet processes each point individually using shared MLPs, then aggregates global features using a symmetric function. These models handle large, complex clouds effectively and demonstrate strong generalization across datasets.
8. Large Scale Segmentation
Large-scale point clouds—common in LiDAR-based city scans—are challenging due to size and density. Approaches such as voxelization, multi-resolution strategies, and parallelization help make real-time or near–real-time processing possible.
This makes them ideal for autonomous driving, mapping, and urban infrastructure modeling.
Applications
Robotic Applications
Segmentation enables robots to interpret 3D environments, detect objects, plan paths, and interact safely. It supports tasks such as SLAM, object picking, and navigation.
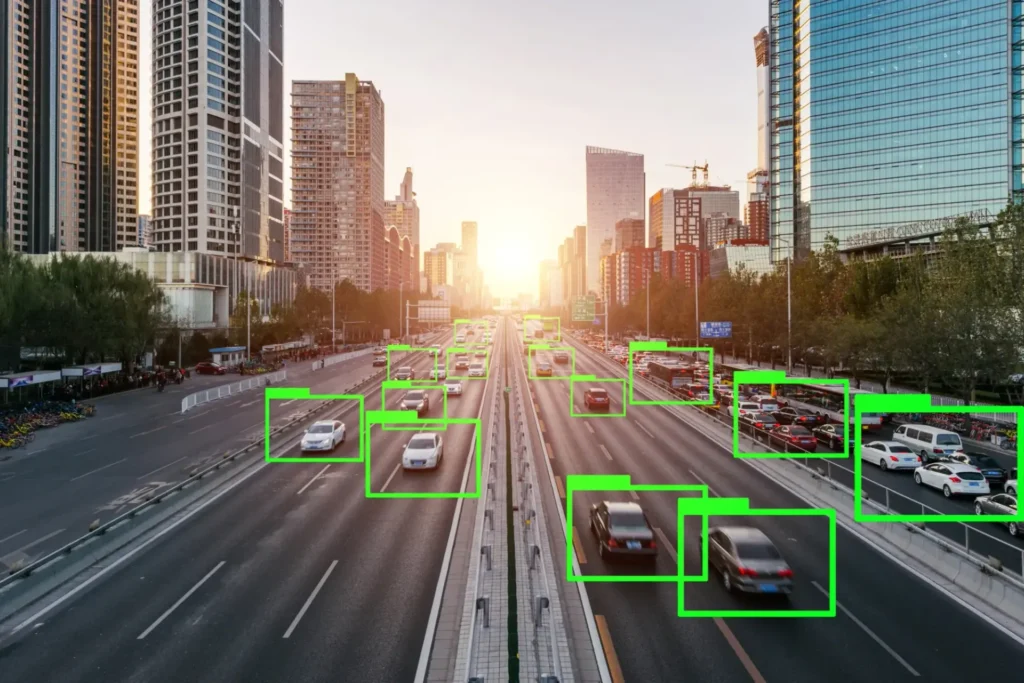
Autonomous Driving
Autonomous vehicles depend heavily on point cloud segmentation for identifying lanes, pedestrians, obstacles, and vehicles. High-density LiDAR data enables precise classification and tracking of dynamic objects.
Surveying
Segmentation simplifies large surveying datasets, separating features like vegetation, terrain, and buildings. It is essential for generating DEMs, monitoring changes over time, or isolating structural modifications.
By automating these processes, surveyors can accelerate workflows and reduce manual processing time.
Conclusion
Point cloud segmentation continues to evolve rapidly, driven by advances in deep learning and scalable processing. From traditional clustering to graph-based approaches and modern neural networks, a diverse set of methods enables effective segmentation across multiple industries.
As 3D sensing technologies expand, future research will aim to enhance segmentation scalability, reduce computational requirements, and further improve deep learning accuracy—solidifying point cloud segmentation as a core component of 3D data analysis.
Coral Mountain Data is a data annotation and data collection company that provides high-quality data annotation services for Artificial Intelligence (AI) and Machine Learning (ML) models, ensuring reliable input datasets. Our annotation solutions include LiDAR point cloud data, enhancing the performance of AI and ML models. Coral Mountain Data provide high-quality data about coral reefs including sounds of coral reefs, marine life, waves….